Will PRT be able to distinguish itself from self-driving cars? Self-driving cars are believed to be able to run on any paved road, on exclusive lanes or on lanes with mixed traffic, with or without a driver, shared or private. This flexibility could open a mass market because there is a smooth transition from the conventional, privately owned car to the automated and shared car of the future.
I believe it is unlikely that shared, fully automated taxis will perform a significant share of urban trips in any foreseeable future. But already the hype, hope and imaginations generated by self-driving cars risk to overshadow, dilute and absorb the concepts and potentials of PRT. Surely, PRT systems, which are already in operation since years, will also profit from the self-driving car propaganda and face better informed clients, less technological skepticism and less regulatory obstacles as compared with the past years.
But what is the main distinguishing feature of PRT? “It is the dedicated guideway” – in the expert’s opinion. However, would this argument be convincing to many clients or potential users, would it make headlines, would it attract investments and open large markets? Probably not. One may even comment that guideways are additional costs and self-driving cars could make use of exclusive guideways too, if necessary.
In my opinion, only if PRT achieved an outstanding performance by making an appropriate use of dedicated guideways then its breakthrough would still be possible: Compared with self-driving cars, PRT would be safer, achieve much high capacities, run faster, be more reliable and energy efficient, vehicles would be lighter and cheaper, and infrastructure would also be lighter and slimmer. Such a PRT system would let self-driving cars look like outdated, heavy and slow technology.
But what is the appropriate use of dedicated guideways? The most important properties of dedicated guideways are that they guarantee a predefined operating environment, the motion of all vehicles is predictable and there exists a small air-gap between vehicle and guideway. These properties can and should be technically exploited; here are some examples:
- Gripping or squeezing of guide-rails with wheels or brakes: this guarantees decelerations and accelerations, maintains predefined headways and therefore provides high safety levels and reliable operation in most weather conditions.
- Stabilizing guide-rails: if guide-rails are used to force the vehicle to say on track then speeds can be reliably increased, in particular in curves.
- Short distance communication devices and sensors: wireless communications and sensing over a few milliliters (between vehicle and guideway) are fast, delay-free and interference-fee; this allows a rapid and precise location of vehicles; further, vehicles can “see” each other through the guideway. This feature contributes to a safely decrease in headways and an increase in capacity.
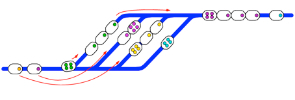
- Automated, mechanical coupling: this is a proven and reliable way to couple vehicles together and to form dynamic trains of arbitrary length; such trains would further boost PRT capacity; vehicles with identical destinations or directions could be joined in special stations, as shown in the figure.
- Synchronous PRT motorways: on high capacity network links, all vehicles would run at high speeds with synchronous motors (with either rotatory motors and a common 3-phase power supply or with linear synchronous motors). Because all vehicles are tied to a common phase, there cannot be a relative movement between vehicles on this link. This means that safety is guaranteed, even at very short distances. Note that with this concept, vehicles need to pre-accelerate to enter the main stream in an asynchronous way, similar to the maneuvers on motorway ramps.
- Power transmission: the small and precise distance between vehicle and guideway allows efficient power transmission, either through current collectors or inductively; there is no need for large, heavy and costly batteries.
- Vehicle prediction: in absence of interferences from other traffic participants, the position and future position of all vehicle are predictable with a high precision. This fact allows ultimately to optimize the on-demand services (minimize waiting times) and to reduce or entirely avoid traffic congestion.
Figure: Station where PRT vehicles with a common destination are coupled together to form trains
This list is not exhaustive. Some features are already realized in existing PRT systems, some are new and need a reality check. However, all of these features cannot be easily implemented with free ranging vehicles, such as self-driving cars. It is my conviction that by consequently developing and optimizing most, if not all, of these guideway-related technologies, one would end up with a PRT system that outperforms self-driving cars, as well as medium capacity light rail trains.
None of the features in the above list is science fiction; I claim that it is more difficult to develop cars able to run through traffic-congested cities without a driver than to implement the features in this list.
The suggested developments do need considerable funding. This is why it is important to deliver accurate impact estimations and demonstrate how such a PRT-network would perform against a fleet of self-driving cars in the same urban settings and with the same transport demand. For this purpose, we are working on large scale micro-simulations and build scenarios where door-to-door trips are simulated with different transport scenarios, including walking, conventional public transit, cars, bikes, and PRT.
By: Joerg Schweizer