November 30th, 2015
By Göran Tegnér, Transek Company
The municipality of Lidingö is an island northeast of Stockholm inner city with 45,000 inhabitants. It is connected to Stockholm via a 6-lane 0.7 km long road bridge and an old tramway and bicycle bridge. The 101 year old Lidingö tramway line has just been re-opened after a two-year upgrading into a modern LRT line. The LRT line connects to the Stockholm metro on the other side of the bridge at Stockholm city border. However the LRT line does not pass the centre of Lidingö. A recent decision has been taken to develop the central part of Lidingö with new housing, more public service and also to double the size of the shopping area. The old tramway and bike bridge has to be replaced by some modern bridge, as repairing the old steel bridge would be too costly.

Two official solutions have been presented:
- A new LRT & bike bridge combined with a re-routing of the LRT line via Lidingö centre
- An extension of the metro line (on a new/alternative bridge from Ropsten in Stockholm to Lidingö Centre (estimated cost: 250 M€ or $ 275 M)

Both alternatives are costly and to get partly state funding for the investments, Lidingö will have to negotiate with the government to build up to 4,200 – 5,600 new apartments.
Legend: Red line = proposed metro extension; Black dotted line= existing LRT line; green line: proposed re-routing of LRT line; Ropsten T (left on map) = Existing metro station in Stockholm; hpl Bodal S (lower right): a site for P+R and for a driverless shuttle bus (see below) Ropsten and Bodal impossible to read on map
I would suggest three other transport solutions that ought to be analyzed as both better and more cost-efficient to LRT or metro extensions, namely:
- A podcar network that combines the LRT –line with both Lidingö Centre and the Ropsten metro station
- A driverless mini-bus shuttle between the Bodal LRT station (see map above) and Lidingö Centre
- A driverless Cable car between Ropsten metro station in Stockholm and Lidingö Centre
A Podcar network
Instead of a 1 km metro extension to the Lidingö Centre estimated to $ 275 M one might get a 6 km Podcar network with eight stations, including seven stations in Lidingö costing about $ 50 M with :
- One station at Bodal LRT stop and a P+R commuter parking;
- One intermediate station;
- Two loops around the Centre with 3 small podcar stations – located at the second floor inside new commercial buildings;
- Two stations in Torsvik on the way toward Stockholm and a connection to the metro station in Ropsten.

The disadvantage of PRT is that it leads to more transfers, but, on the other hand, the podcar vehicle is waiting for you. Experience from the London Heathrow Ultra Global PRT shows that 90 % of the travelers have to wait less than 1 minute (less than 10 seconds average waiting time) for the ride.
The total number of transit trips between Stockholm and Lidingö is presently around 30,000 per day and 2,500 in the peak hour. Before the year 2030 ridership might increase up to 40,000 – 45,000 transit trips. A rough estimate of the Podcar ridership in Lidingö 2030 might be between 15,000 and 20,000 daily trips. This corresponds to approximately 2,100 – 2,800 trips during the busiest afternoon hour. A podcar network with 140 vehicles is estimated to cost about $ 50 M, or one fifth or the metro cost. Figure 2. Beamways system in Linköping.
Image: Hans Kylberg
At 20 % of the metro cost, one will get a much better transit system with much shorter waiting times and a system that covers a much larger area.
A Driverless minibus shuttle
A driverless shuttle bus that connects the Lidingö LRT line and the southern parts of Lidingö with the enlarged Lidingö Centre can meet all LRT line arrivals to the current stop and cause almost no waiting. The shuttle bus could go into a loop around the new Lidingö Centre.
The CityMobil2 project
Driverless bus shuttles have been in operation for more then ten years in the Netherlands, and this system is now being tested in La Rochelle, France, so the technology is relatively well proven. The buses run on ordinary roads in mixed traffic with full security. Now there is an EU project, CITYMOBIL2, with the aim of spreading knowledge of such innovative bus shuttles. I am convinced that this is worth studying more closely for Lidingö, but also for other municipalities in Stockholm County. I intend to contact the County Council, which is responsible for the county’s public transportation, in this matter. Facts about Park Shuttle in Rivium Business Park, Capelle Ann den Ijssel, the Netherlands:• Battery-operated mini-buses with 20 seats• 2.5 min frequency in peak hours• 2,500 passengers per day• Demand driven in off-peak hours• 1,800 meters distance• 5 stops• 6 buses
The Park Shuttle system is operated at a cost similar to that of a bus line, but provides a much better service level (2.5 vs. 12 minutes). Personnel costs are substantially lower as only one operator is required to keep 6 vehicles running.With 24 departures per peak hour the capacity is 480 passengers per direction.
A driverless bus shuttle could both serve the Lidingö LRT travelers, and also serve as a shuttle for motorists to get to and from Lidingö Centre from the P+R parking (about 2.5 km away) facility now being built. This parking could also serve as a “remote” parking and relieve some of the planned downtown parking lot, and also reduce the costs of the underground city parking lot, which then could be built smaller.

I believe this is a very interesting option that should be studied and analyzed into more detail. “My” Liberal party at Lidingö has accepted this idea, but not the conservative majority parties.
A Driverless Cable Car between Stockholm and Lidingö
Depending on the division of responsibility between the municipality of Lidingö (local road an building planning), the Stockholm County Council (public transport planning) and the National Government (major infrastructure and housing policy), one could label the various bridge connections as “bridge over troubled waters”…
But why a bridge at all? “Urban Cable cars ready for take-off. Do you remember those funny cabins that would carry you to the top of the mountain during your last ski holidays? Well get ready to see them in cities too. The urban cable car is becoming established as an increasingly sustainable means of public transport.
From New York to Caracas and Rio de Janeiro, there are more and more urban cable-car initiatives all over the world. Today, we have found over fifty of these structures in the largest cities”, as Sustainable-mobility.org formulates it.
The Roosevelt Island Tramway, built in 1976 was upgraded in 2010. It is an aerial tramway in New York City that spans the East River and connects Roosevelt Island to the Upper East Side of Manhattan. The tram moves at about 17.9 mph (28.8 km/h) and travels 3,100 feet (940 m) in 3 minutes. Two cabins make the run at fifteen-minute intervals from 6:00 a.m. to 2:00 a.m. (3:30 a.m. on weekends) and continuously during rush hours.
The Emirates Air Line. In the summer of 2012, London’s first urban cable car crossing the River Thames opened between the Royal Docks and the Greenwich peninsula. The London Mayor has secured a ten-year £ 36 M sponsorship deal for the new cable car with Emirates Airline. “Flying” over the Thames since 2012, it provides an unobstructed view over the city as it travels one kilometre between Greenwich Peninsula and the Royal Docks, just five minutes from the Olympic village by North Greenwich Tube station.

An urban cable car connection between the Ropsten Metro station and Lidingö Centre, a distance of about 2.5 km, and with one intermediate stop at Torsvik, could be an appropriate solution at a much lower cost than the proposed quite expensive metro solution. Today the peak hour demand is 2,300 passengers by bus and by the LRT line together across the water.
A Tricable Gondola can carry up to 6,000 passengers in 35 passenger cabin at a speed of 24 -27 kph. A high forecast for the future demand would reach about 5,500 passengers per hour per direction. With departures every 14th second such a demand can be managed.
Rough cost estimates based on a feasibility study made by the Stockholm Transit Authority (SL) (and applied to this project idea) results in a capital cost of about $ 25 – 30 M. This is on tenth of the costs for the metro extension! The annual operating costs are calculated to amount 5 % of the total capital cost, that is $ 1.5 M per annum.
I believe this is a very interesting option that should be studied and analyzed into more detail.
What are the benefits of driverless transit systems compared to heavy rail and LRT?
- Shorter travel times (substantially reduces travel an waiting times)
- Serving a wider area with several stops compared to only one metro station
- Higher seating capacity than the Lidingö LRT line
- Low operating costs as podcars are driverless
- Shorter construction period than for metro
- Savings in the local bus network
- Increased value of real estate with increased availability
- Attracts motorists who could leave their car at home
- Reduces car ownership and the need for parking space
- A spectacular and innovative land-mark for Lidingö.
- A futuristic sustainable transport, reducing the climate impact of car traffic










 Walter Kulyk, P.E.
Walter Kulyk, P.E.










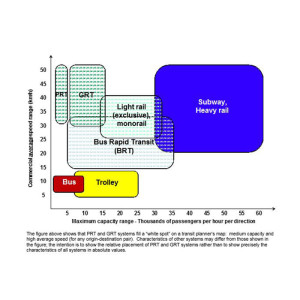 The boom in Bus Rapid Transit (BRT) systems worldwide over the past 15 years demonstrates that giving new use to existing infrastructure – e.g. dedicating existing traffic lanes to buses (typically high-capacity buses) – makes sense, wherever and whenever this can be done. In many cities, however, the number of avenues where BRT corridors can be implemented is very limited. Furthermore, while travel on BRT is certainly faster than on a conventional bus, intersections often place a relatively low limit on the average speed of surface-level BRT.
The boom in Bus Rapid Transit (BRT) systems worldwide over the past 15 years demonstrates that giving new use to existing infrastructure – e.g. dedicating existing traffic lanes to buses (typically high-capacity buses) – makes sense, wherever and whenever this can be done. In many cities, however, the number of avenues where BRT corridors can be implemented is very limited. Furthermore, while travel on BRT is certainly faster than on a conventional bus, intersections often place a relatively low limit on the average speed of surface-level BRT.

