Article by Alexander Kyllmann
Do you think Personal Rapid Transit (PRT) sounds cool but will never be implemented as an urban transit solution? Or that it’s an idea whose time has come and gone with the advent of driverless cars? You’re right. And wrong.
Automated Transit Networks (ATN), whether PRT or GRT (Group Rapid Transit), are meant to be rapid transit solutions – as indicated by their names. By definition, rapid transit is different from other forms of mass transit by its operation on exclusive right-of-way, with no access for other vehicles or for pedestrians, in order to raise average speed well above the average speed of metropolitan mixed traffic. And this requires infrastructure, either new (additional) infrastructure or existing infrastructure but with a new dedicated use.
 The boom in Bus Rapid Transit (BRT) systems worldwide over the past 15 years demonstrates that giving new use to existing infrastructure – e.g. dedicating existing traffic lanes to buses (typically high-capacity buses) – makes sense, wherever and whenever this can be done. In many cities, however, the number of avenues where BRT corridors can be implemented is very limited. Furthermore, while travel on BRT is certainly faster than on a conventional bus, intersections often place a relatively low limit on the average speed of surface-level BRT.
The boom in Bus Rapid Transit (BRT) systems worldwide over the past 15 years demonstrates that giving new use to existing infrastructure – e.g. dedicating existing traffic lanes to buses (typically high-capacity buses) – makes sense, wherever and whenever this can be done. In many cities, however, the number of avenues where BRT corridors can be implemented is very limited. Furthermore, while travel on BRT is certainly faster than on a conventional bus, intersections often place a relatively low limit on the average speed of surface-level BRT.
To be effective, a city’s rapid transit network needs to reach well beyond the main avenues where it is easy to implement BRT. It also needs to offer its users total commuting times (waiting times + travel times) that are comparable to or better than travel by car. It needs to be safe, which includes a safe environment for its users (without having commuters packed like sardines into a train or bus, hoping their wallets or mobile phones will still be in their pockets when they exit). And it needs to be sustainable, both environmentally and economically.
ATN systems, with smaller and lighter driverless vehicles, and leaner infrastructure, should deliver in all these respects. But, at what capacity level ? Dedicating infrastructure, whether new or existing, to a transit system must definitely be worth it, and this is true in any country. ATN systems have been and continue to be criticized for not being capable of carrying a significant traffic load that would warrant the investment. Most experts will agree that a GRT system can transport 10,000 or more passengers per hour per direction on the main line. Line capacity, however, is only part of the equation; it needs to be matched with station capacities to avoid bottlenecks. It has only been recently that the ATN industry has started to make significant progress in the area of station design and the corresponding guideway layout in and around stations. One thing is certain, however: a system with “personal” vehicles will never have the rush-hour capacity and will always be much more complicated and costly to manage at the stations than a system that systematically groups passengers.
So, where do ATN systems fit on a transit planner’s map? Where medium-capacity, high-average-speed lines or networks are needed, in order to complement and improve a city’s existing transit network. Urbanization continues worldwide, and providing better urban mobility in the coming years will require multiple solutions, not just one. Driverless cars, or pods, will play an important role, especially when used as part of an Automated Transit Network with systematic ride sharing. Someday soon, the acronym PRT will no longer refer to “Personal Rapid Transit” but to “Pod Rapid Transit”. Regards to the naysayers!

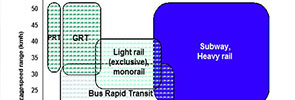
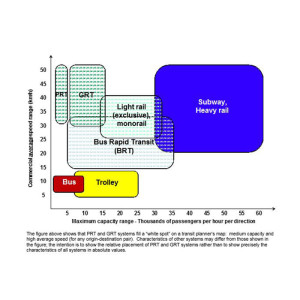
The figure to the right shows that PRT and GRT systems fill a “white spot” on a transit planner’s map: medium capacity and high average speed (for any origin-destination pair). Characteristics of other systems may differ from those shown in the figure; the intention is to show the relative placement of PRT and GRT systems rather than to show precisely the characteristics of all systems in absolute values.
About the author: Alexander Kyllmann is co-founder and CEO of ModuTram Mexico, member of the ATRA Industry Group.







